對水庫地形進(jìn)行測繪,獲取水庫的地形數(shù)據(jù),有利于了解和確定水庫的運行狀態(tài),為水庫的防洪調(diào)度、運營管理等工作提供實用的技術(shù)依據(jù),本次針對湖南某水塘生態(tài)治理項目中實際測得水庫的地形測繪工作,主要采用了無人船、無人機(jī)等先進(jìn)的智能裝備,很好地解決了傳統(tǒng)人工實測手段工作量大、危險性高的痛點,并進(jìn)一步擴(kuò)大了測繪覆蓋范圍。其中,水下地形測繪采用全自動無人船,通過該無人船平臺搭載小型多波束測深系統(tǒng)采集了該水庫高精度水下地形數(shù)據(jù),為水庫運行管理的相關(guān)工作提供了有力的基礎(chǔ)數(shù)據(jù)支撐。
調(diào)查人員攜帶全自動無人船平臺等測量裝備到達(dá)水庫碼頭現(xiàn)場后,對整套測量系統(tǒng)進(jìn)行了快速的組裝。調(diào)查人員完成整套無人測量系統(tǒng)的安裝工作后,進(jìn)入系統(tǒng)聯(lián)調(diào)測試階段。
相較于有人船安裝多波束,安裝+校準(zhǔn)準(zhǔn)備時間長達(dá)3-4小時,而無人船搭載多波束為免安裝校準(zhǔn),節(jié)約測前的90%的準(zhǔn)備時間。
在作業(yè)過程中,調(diào)查人員可在岸端控制基站遠(yuǎn)程控制升降機(jī)構(gòu),有利于保障多波束換能器的作業(yè)安全。
完成調(diào)試后,無人船開始執(zhí)行水庫的水下地形測量任務(wù)。調(diào)查人員根據(jù)測量任務(wù)要求及現(xiàn)場情況,通過無人船控制基站軟件布設(shè)測線并發(fā)送給無人船執(zhí)行。
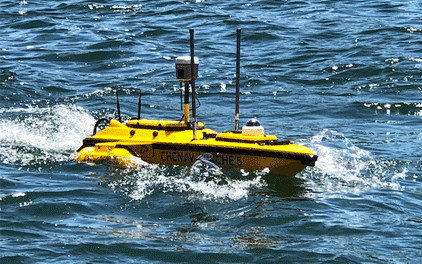
作業(yè)中的無人船示意圖
無人船在執(zhí)行測繪任務(wù)過程中,調(diào)查人員可在岸基控制基站上實時監(jiān)測多波束數(shù)據(jù)采集情況,并通過船端攝像頭回傳的視頻查看船只周邊環(huán)境情況,可根據(jù)無人船回傳的實時水深及周邊環(huán)境視頻更改無人船任務(wù)指令。
數(shù)據(jù)處理
利用Surfer軟件強(qiáng)大的功能,實現(xiàn)水下地形測量的數(shù)據(jù)展現(xiàn),制作出精美的平面及3D等高線圖。步驟總結(jié)為以下三步:
一、 輸入經(jīng)緯度和水下高程,保存為bln文件;
打開Surfer軟件,新建worksheet,然后錄入(批量導(dǎo)入)數(shù)據(jù),保存為bln格式文件。 下圖為批量導(dǎo)入數(shù)據(jù)示意圖:
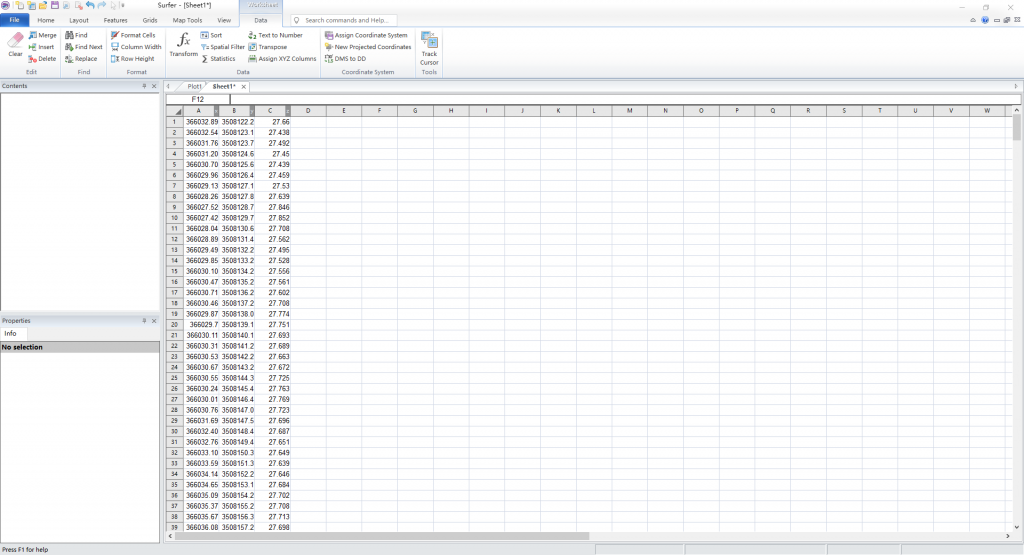
批量導(dǎo)入數(shù)據(jù)示意圖
二、將數(shù)據(jù)文件網(wǎng)格化,保存報告為rtf格式;
1) 利用Grid-Grid Data功能,選擇需要進(jìn)行網(wǎng)格化的bln文件

Grid-Grid Data功能布局示意圖
2) 參數(shù)修改,例如,修改XYZ對應(yīng)的數(shù)據(jù)列,選擇不同網(wǎng)格投影,設(shè)置經(jīng)緯度范圍等。若不做修改可自動生成網(wǎng)格化文件,保存該報告為rtf格式。
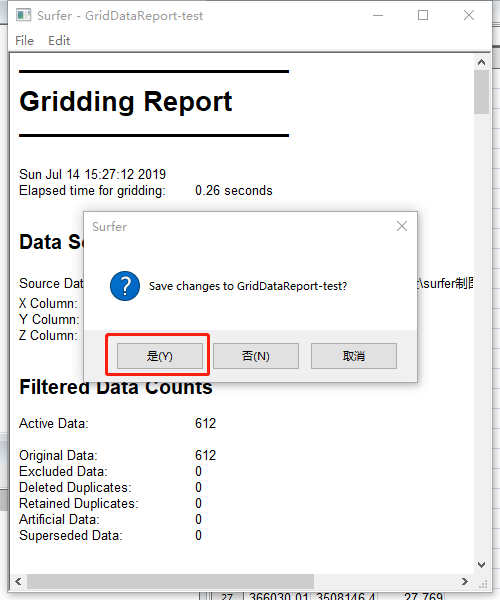
保存報告示意圖
三、加載相應(yīng)的網(wǎng)格化文件,打開后即可一鍵成圖成圖。下圖為該水庫的3D表面模型。
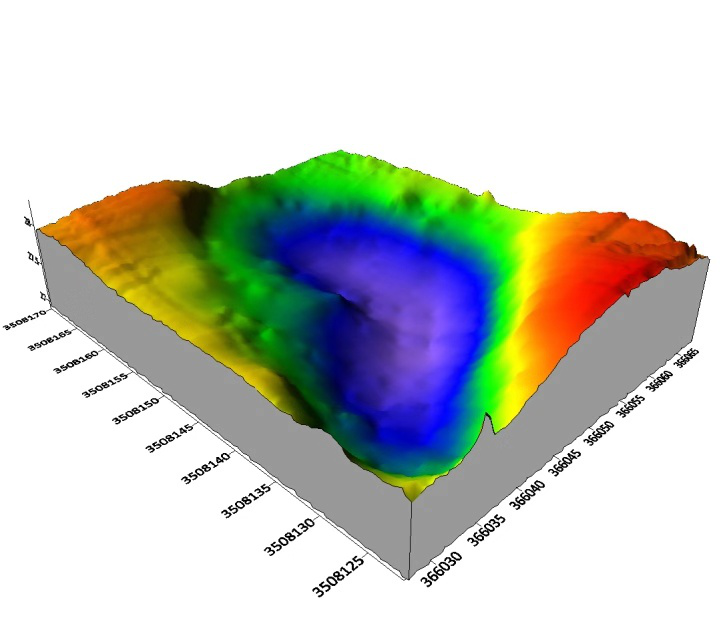
水庫的3D表面模型
總結(jié)
制作的水下三維表面模型,加上水位面之后,可以更直觀的顯示不同水位下的淹沒情況,對淹沒分析和庫容水位模型的建立都有一定的意義。


 在線咨詢
在線咨詢